聯(lián)系人:劉先生
電 話:13932635398
手 機:13932635398
手 機:18731612495
在線咨詢QQ:2035687447
公司地址:廊坊市安次區(qū)盛德花園(南底商)20-1-101
電 話:13932635398
手 機:13932635398
手 機:18731612495
在線咨詢QQ:2035687447
公司地址:廊坊市安次區(qū)盛德花園(南底商)20-1-101
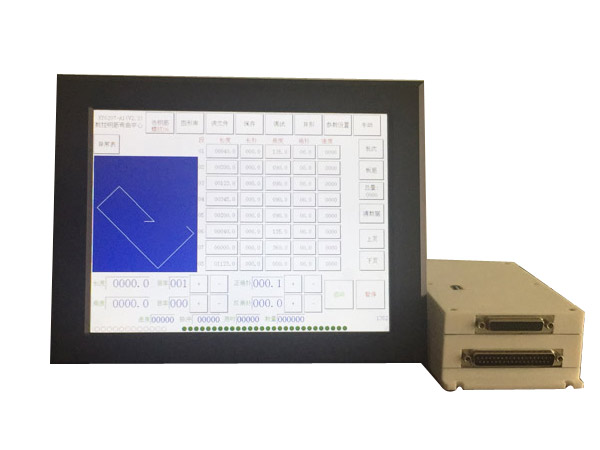
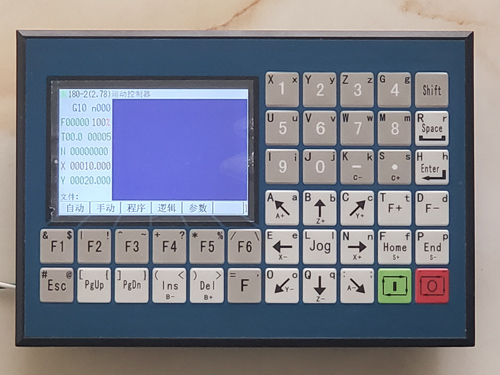
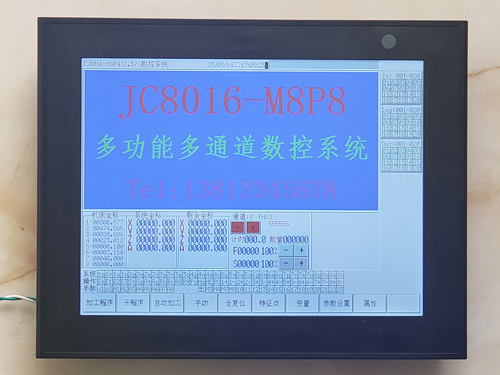
通用型運動控制器如何實現(xiàn)機械設(shè)備多種運動模式的精準控制
添加時間:2023-04-29 02:30:54 文章來源:廊坊市九盈數(shù)控技術(shù)有限公司
通用型運動控制器是一種可編程的運動控制設(shè)備,它可以實現(xiàn)對機械設(shè)備多種運動模式的精準控制。其實現(xiàn)方法主要有以下幾種:
插補算法:插補算法是一種運動控制算法,它可以實現(xiàn)多軸協(xié)調(diào)運動控制。通用型運動控制器通過插補算法,將多個軸的運動軌跡進行插補計算,實現(xiàn)多種復雜的運動模式控制,如直線插補、圓弧插補、螺旋線插補等。
PID控制:PID控制是一種閉環(huán)控制算法,可以實現(xiàn)對機械設(shè)備的位置、速度、加速度等參數(shù)的精準控制。通用型運動控制器通過PID控制算法,對機械設(shè)備的運動參數(shù)進行閉環(huán)控制,實現(xiàn)對多種運動模式的精準控制。
預測控制:預測控制是一種基于模型的控制算法,可以通過建立機械設(shè)備的數(shù)學模型,預測其未來運動狀態(tài),并進行控制。通用型運動控制器通過預測控制算法,對機械設(shè)備的運動狀態(tài)進行預測,并通過控制算法實現(xiàn)對多種運動模式的精準控制。
人機界面:通用型運動控制器還可以通過人機界面實現(xiàn)對機械設(shè)備多種運動模式的精準控制。通過人機界面,用戶可以對機械設(shè)備的運動參數(shù)進行設(shè)置和控制,實現(xiàn)對多種運動模式的精準控制。
綜上所述,通用型運動控制器可以通過插補算法、PID控制、預測控制、人機界面等多種方法實現(xiàn)對機械設(shè)備多種運動模式的精準控制。同時,通用型運動控制器還具有可編程性、靈活性、可擴展性等特點,可以根據(jù)不同的應用場景和需求進行配置和擴展,滿足不同機械設(shè)備的運動控制需求。
相關(guān)產(chǎn)品






 冀公網(wǎng)安備 13100202000581號
冀公網(wǎng)安備 13100202000581號