電 話:13932635398
手 機(jī):13932635398
手 機(jī):18731612495
在線咨詢QQ:2035687447
公司地址:廊坊市安次區(qū)盛德花園(南底商)20-1-101
碼垛機(jī)器人的伺服運(yùn)動(dòng)控制系統(tǒng)的軟件設(shè)計(jì)涉及到以下幾個(gè)方面:
運(yùn)動(dòng)規(guī)劃算法設(shè)計(jì):運(yùn)動(dòng)規(guī)劃算法用于確定機(jī)器人的軌跡和動(dòng)作,包括路徑規(guī)劃和插補(bǔ)控制。可以使用常見(jiàn)的運(yùn)動(dòng)規(guī)劃算法,如直線插補(bǔ)算法、圓弧插補(bǔ)算法等,根據(jù)碼垛任務(wù)的需求進(jìn)行定制化設(shè)計(jì)。
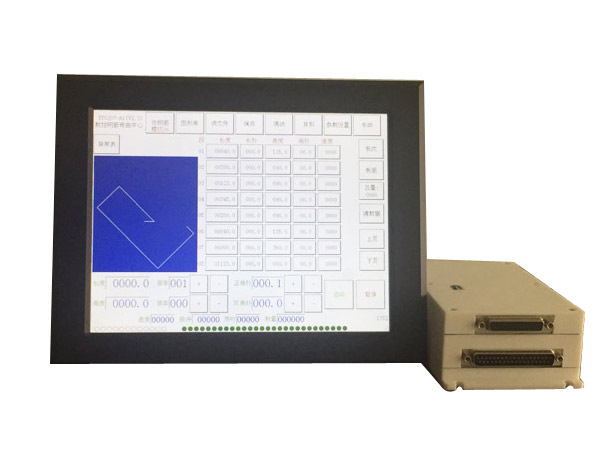
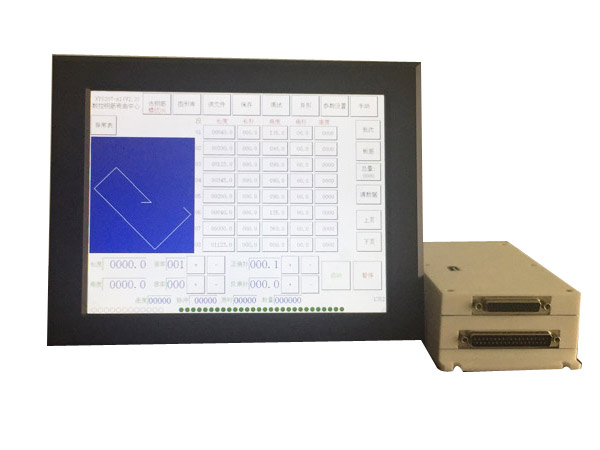
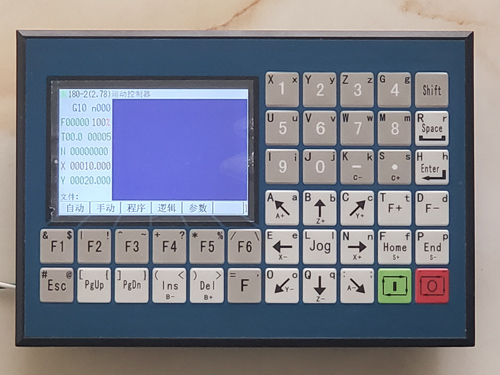
控制器設(shè)計(jì):控制器是伺服運(yùn)動(dòng)控制系統(tǒng)的核心部分,用于控制機(jī)器人的運(yùn)動(dòng)和動(dòng)作。控制器需要具備實(shí)時(shí)性、穩(wěn)定性和精確性。可以選擇合適的控制器平臺(tái),如PLC、PC、嵌入式系統(tǒng)等,并根據(jù)具體需求設(shè)計(jì)控制算法,如位置控制、速度控制、力控制等。
運(yùn)動(dòng)控制算法設(shè)計(jì):運(yùn)動(dòng)控制算法用于根據(jù)運(yùn)動(dòng)規(guī)劃算法生成的軌跡,計(jì)算機(jī)器人的運(yùn)動(dòng)控制指令。常見(jiàn)的運(yùn)動(dòng)控制算法包括PID控制算法、模糊控制算法、自適應(yīng)控制算法等。根據(jù)具體需求,可以選擇合適的運(yùn)動(dòng)控制算法,并進(jìn)行參數(shù)調(diào)整和優(yōu)化。
傳感器數(shù)據(jù)處理:碼垛機(jī)器人通常會(huì)使用各種傳感器,如視覺(jué)傳感器、激光傳感器等,用于感知環(huán)境和目標(biāo)物體。軟件設(shè)計(jì)需要將傳感器數(shù)據(jù)進(jìn)行處理和分析,提取關(guān)鍵信息,如物體位置、大小、形狀等,用于運(yùn)動(dòng)規(guī)劃和運(yùn)動(dòng)控制。
用戶界面設(shè)計(jì):為了方便操作人員對(duì)機(jī)器人進(jìn)行控制和監(jiān)控,可以設(shè)計(jì)一個(gè)用戶界面,用于設(shè)置任務(wù)參數(shù)、監(jiān)視機(jī)器人狀態(tài)、顯示任務(wù)進(jìn)度等。用戶界面可以使用圖形界面或者Web界面,提供友好的操作體驗(yàn)。
通信模塊設(shè)計(jì):為了實(shí)現(xiàn)與上位機(jī)或其他設(shè)備的通信,可以設(shè)計(jì)一個(gè)通信模塊,用于接收指令、發(fā)送狀態(tài)信息等。通信模塊可以使用串口通信、以太網(wǎng)通信等方式,通過(guò)協(xié)議進(jìn)行數(shù)據(jù)傳輸。
在軟件設(shè)計(jì)過(guò)程中,需要考慮到實(shí)時(shí)性、穩(wěn)定性、可靠性和可擴(kuò)展性等要求。同時(shí),還需要進(jìn)行系統(tǒng)測(cè)試和調(diào)試,確保軟件設(shè)計(jì)的正確性和可靠性。






 冀公網(wǎng)安備 13100202000581號(hào)
冀公網(wǎng)安備 13100202000581號(hào)